| 14-Bit- und 16-Bit-Auflösung |  |
| 4′ und 2′ Genauigkeit | |
| 2 VA Ausgangsleistung | |
| Niedriger Radiusvektorfehler (0,03 %) | |
| Ausgestattet mit Überspannungsschutz und Kurzschlussschutz | |
| Ausgestattet mit telemetrischem Ausgangsstift | |
| Ohne die Notwendigkeit einer externen Anpassung | |
| Pin-zu-Pin-Kompatibilität mit dem Produkt DRC1745/1746 der Firma AD |
Drive-Synchro/Resolver; Antennensystem; Servosystem; integriert
Simulator.
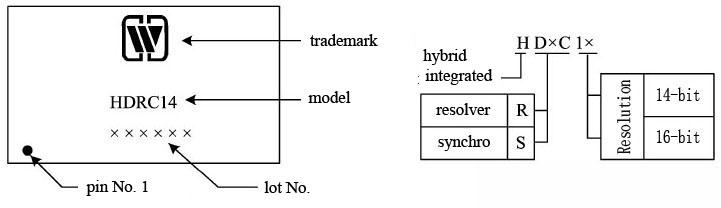
3. Beschreibung der Digital-zu-Synchro-Konverter oder Digital-zu-Resolver-Konverter der Serie HDRC14-16
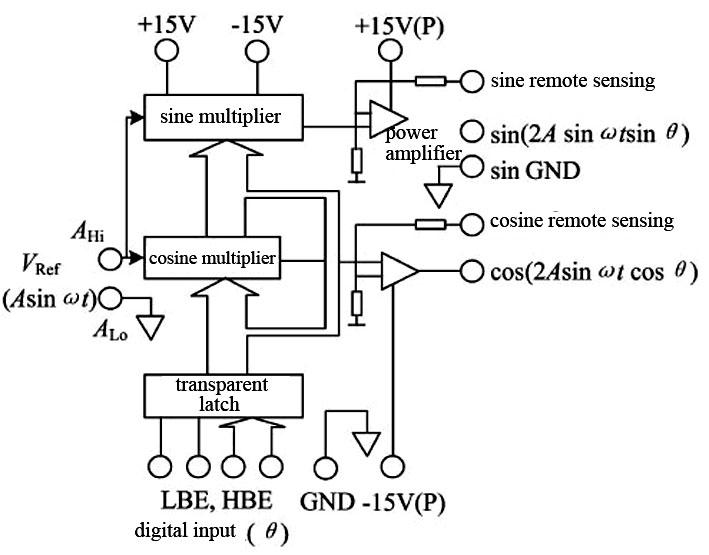
Das Produkt der HDRC14/HDRC16-Serie ist ein Digital-zu-Resolver-Konverter oder
Digital-Synchro-Umsetzer mit hybrider integrierter Schaltungsstruktur
Die Last kann eine induktive Last, eine kapazitive Last oder eine ohmsche Last sein, und das ist sie auch | |
mit Überstrom- und Überspannungsschutz versehen. Die Ausgabe von | Konverter kann den Resolver direkt ansteuern und kann auch den ansteuern Steuertrafo des Synchro durch Anschluss eines externen Trafos. Die einzigartige Leistung der Produkte der HDRC14/HDRC16-Serie ist Sinus und |
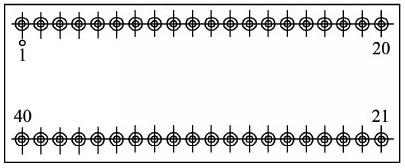
Kosinus-Telemetrieausgang. Daher kann es bei der Durchführung von LangstreckenfahrtenStellen Sie die Genauigkeit des konvertierten Ausgangssignals sicher. | Produkte der Serien HDRC14/HDRC16 sind mit einer internen Verriegelung ausgestattet, die wird durch das High-Bit-Enable-Ende HBE und das Low-Bit-Enable-Ende gesteuert LBE und kann bequem mit dem Datenbus verbunden werden. Die Produkte der Serien HDRC14/HDRC16 sind Dual-Inline-40-Pin-Metallgehäuse. |
4. Elektrische Leistung (Tabelle 1, Tabelle 2) von Digital-zu-Synchro-Konvertern oder Digital-zu-Resolver-Konvertern der Serie HDRC14-16 | ||||||
Tabelle 1 Nennbedingungen und empfohlene Betriebsbedingungen | Absolute max. Nennwert | Versorgungsspannung Vs: ± 7,25 V | Logikspannung VL: +5,5 V | Lagertemperaturbereich: -65℃~+150℃ | ||
Empfohlener Betrieb | Bedingungen | Versorgungsspannung Vs: ± 5V | Logikspannung VL: +5V | |||
Referenzfrequenz f: 400Hz~2000Hz | - | 14 | - | 16 | Betriebstemperaturbereich TA: -55℃~125℃ | |
Tabelle 2 Elektrische Eigenschaften | - | Charakteristisch | - | ±2 | HDRC14 | |
HDRC16 | Einheit | Bemerkungen | Mindest. | max. | V | |
Mindest. | max. | Auflösung | Bit | Winkelfehler | V | |
±5,3 Winkelminute | Analoger Referenzeingang | 3.23 | 3.57 | 3.23 | V | |
3.57 | - | 25 | - | 25 | Signalausgang des Resolvers | |
6.46 | 0 | 7.14 | 0 | 6.46 | 7.14 | |
Gewinnen | (VRef-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
Temperaturkoeffizient der Ausgangsverstärkung | - | 2 | - | 2 | VA | |
PPM/℃ | - | Analoger Eingangsfrequenzbereich | - | 2.6 | - | |
2.6 | kHz | Analoge Eingangsimpedanz | - | |||









 (2) Pulsierende Stromversorgung
(2) Pulsierende Stromversorgung
Z u003d Ausgangslast | (3)Beispiel für den Stromverbrauch | Es gibt viele Faktoren, die den Stromverbrauch beeinflussen, die | Die folgenden vier Beispiele verwenden typische Lasten und den schlechtesten digitalen Winkel | Zustand (45º). Diese Beispiele können die Verwendung von pulsierender Leistung veranschaulichen | kann den Stromverbrauch reduzieren. | Hier sind die Betriebsbedingungen: | VDCu003d±15V; Upu003d3V; Vout u003d 9,6 V (RMS-Wert beträgt 6,8 V); VAC u003d 9,6 V (ca | gleich Vout); I1u003d292 mA (entspricht einer Last, die 1,4 VA benötigt). |
1 | ① Gleichstromversorgung, θu003d45º, ohmsche Last | ② Wie in Beispiel 1, die Stromversorgung ist eine pulsierende 3-V-Stromversorgung. | 13 | Bei Verwendung der pulsierenden Leistung wird die interne Leistungsaufnahme um 1,75 W reduziert, ihr Verhältnis beträgt 3,2:1. | ③ Gleichstromversorgung, θu003d45º, rein induktive Last | 28 | ④ Wie in Beispiel 3, die Stromversorgung ist eine pulsierende 3-V-Stromversorgung. | (4)Laden |
2 | D2 | Als nächstes zeigen wir, wie die Last berechnet wird. Für die Kontrolle | 14 | Transformator von Synchro, zuerst ist es erforderlich, den Wert von Zso zu erhalten, | die in der Regel vom Synchro-Hersteller bereitgestellt wird. Die Kontrolle | 29 | V- | Belastung ist: |
3 | D3 | Wobei V2 der RMS-Wert der Signalspannung ist. | 15 | Wenn am Ausgangspin ein Ausgangstransformator hinzugefügt wird, müssen 0,25 VA zur berechneten Leistung hinzugefügt werden. | Nehmen wir zum Beispiel an, dass der RMS-Wert des Signals 90 V, 400 Hz beträgt, verwenden | 30 | V+ | Externer Ausgangstransformator HRDC14 zur Ansteuerung des Steuertransformators |
4 | D4 | synchron. Die Verwendung eines externen Transformators dient zur Erhöhung des RMS-Wertes | 16 | Spannungsausgang des HRDC14 von 6,8 V bis 90 V von der Steuerung gefordert | Transformator. | 31 | Für den Steuertransformator von Synchro ist Zso 700+j4900. | Daher beträgt die Belastung bei Verwendung des Steuertransformators: |
5 | D5 | ; dann ergibt sich zuzüglich der zusätzlichen Leistungsaufnahme des Trafos eine Gesamtleistungsaufnahme von 1,48 VA. | Dieses Verfahren kann auch für die Anwendung verwendet werden, die den Dreh verwendet | NC | Steuertransformator, muss aber nicht mit 3/4 multipliziert werden. | 32 | LE | 6. MTBF-Kurve (Abb. 3) von Digital-zu-Synchro-Konvertern oder Digital-zu-Resolver-Konvertern der Serie HDRC14-16 |
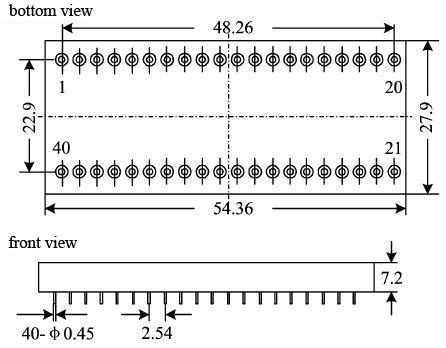
6 | D6 | Abb. 3 MTBF-Temperaturverlauf | 21 | (Anmerkung: nach GJB/Z299B-98, gute Bodenbeschaffenheit vorausgesetzt) | 7. Pin-Bezeichnung (Abb. 4, Tabelle 3) der Digital-zu-Synchro-Konverter oder Digital-zu-Resolver-Konverter der Serie HDRC14-16 | 33 | HE | Abb.4 Schematisches Diagramm des Stifts (Unteransicht) |
7 | D7 | Tabelle 3 Funktionsbeschreibung der Stifte | 22 | Stift | Symbol | 34 | Funktion | Stift |
8 | D8 | Symbol | 23 | Funktion | Stift | 35 | Symbol | Funktion |
9 | D9 | D1 (MSB) | 24 | 1. Bit-Digitaleingang | D13 | 36 | 13.-Bit-Digitaleingang | GNDA |
10 | Analoge Masse | 2. Bit-Digitaleingang | 25 | D14 (LSB) | 14 Bit-Digitaleingang | -15 V Stromversorgung | NC | 3. Bit-Digitaleingang |
11 | D15 | 15.-Bit-Digitaleingang | 26 | +15V Stromversorgung | 4. Bit-Digitaleingang | |||
12 | D16 (LSB) | 16 Bit-Digitaleingang | 27 | V1+ | +5V Stromversorgung |
Ende des Cosinus-Ausgangs | Hohe 8-Bit-Auswahl aktiviert | 7.-Bit-Digitaleingang | Vsin | Ende des Sinusausgangs | RLo | |
1 | Niedriges Ende des Referenzeingangs | 7 | 8 Bit-Digitaleingang | 13 | V+P | |
2 | +15V pulsierende Leistung | 8 | RHi | Oberes Ende des Referenzeingangs | 9. Bit-Digitaleingang | |
3 | V-P | 9 | -15 V pulsierende Leistung | 15 | Fall | |
4 | Gehäuseboden | 10 | D10 | 10.-Bit-Digitaleingang | cos Telemetrie | |
5 | Cosinus telemetrisches Ende | 11 | 37-40 | |||
6 | Keine Verbindung | 12 | D11 |
Telemetrie der Sünde | Sinus telemetrisches Ende |
 | |
erforderlich, dann können „HBE“ und „LBE“ offen sein. | Alle digitalen Eingangspins müssen 27kΩ Pull-up-Widerstand enthalten | mit 5V-Stromversorgung verbunden, also wenn 50μA Strom an irgendeinem Latch-Eingang | Pin-Lecks zum externen digitalen Laufwerk, es kann immer noch alle Eingaben sicherstellen | Mit TTL-Pegel kompatible Pins sind stabil. | 8. Tabelle der Gewichtswerte (Tabelle 4) von Digital-zu-Synchro-Konvertern oder Digital-zu-Resolver-Konvertern der Serie HDRC14-16 | Tabelle 4 Tabelle der Gewichtswerte | Bit/(MSB) | Winkel |
Bit/(MSB) | Winkel | Bit/(MSB) | Winkel | 180.000 0 | 2.812 5 | 0,043 9 | 90.000 0 |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier