| DC-Eingangsspannung: 30 V ± 2 V |  |
| Kontinuierliche Ausgangsspannung: 10 A | |
| Spitzenausgangsstrom 20A | |
| TTL Breiter Rechtecksignaleingang | |
| Richtungssteuereingangssignal | |
| Isoliert zwischen dem Eingangssignal undAusgangssignal |
Absolut beste Bewertung | Betriebsbedingungen |
Versorgungsspannung VCC: 7 V Versorgungsspannung VS: 40 V Lagertemperatur: -60 ~ +150 ℃ Bleischweißtemperatur (10S) Th: 300℃ Spitzenantriebsstrom: IOP: 10 A Sperrschichttemperatur Tj: 150℃ | Versorgungsspannung VCC: 5 V ± 0,25 V Versorgungsspannung Vs: 30 V ± 2 V Betriebstemperatur (Gehäuse) Tc:-55~+125℃ |
No | Charakter | Bedingungen VCC u003d 5 V ± 0,25 V UV u003d 30 V ± 0,3 V -55℃≤Tc≤125℃ RLu003d10Ω±2Ω | HISA01A | Symbol | |
Mindest | max | ||||
1 | Schaltfrequenz | PWM-Rechteckwellensignal eingeben,DIR-Richtungssignal verbinden „0“ oder „1“ | 50 | - | HZ |
2 | Dauerausgangsstrom | Anpassen von RL (Lastwiderstand) zum Eingeben eines PWM-Rechteckwellensignals (das Tastverhältnis ist 100 % hoch) DIR Richtungssignal verbinden „0“ oder „1“ | 3 | - | A |
3 | Amplitude der Rechteckwellenspannung ausgeben | Eingang PWM-Rechtecksignal,DIRu003d0,Ausgang positive unipolare Rechteckwelle | 26 | 30 | V |
PWM-Rechteckwellensignal eingeben,DIRu003d1,Negative unipolare Rechteckwelle ausgeben | 26 | 30 | V | ||
4 | Effizienz | Eingangs-PWM-Rechteckwellensignal (Das Tastverhältnis ist 100 % hoch) DIR Richtungssignal verbinden „0“ oder „1“ | 95 | - | % |
5 | Statischer Stromverbrauch | VCCu003d5V±0.25V VSu003d30V±0.3V,Ohne Last RL | - | 4 | W |

No | Symbol | Bezeichnung | No | Symbol | Bezeichnung |
1 | GND1 | Eingangssignal Erde | 7 | SENB | Laststrommessklemme B |
2 | PWM | PWM-Signal eingeben | 8 | AUSB | Ausgang B |
3 | VCC | +5V Stromversorgung | 9 | VS | Netzteil |
4 | DIR | Eingangsrichtung Steuersignal | 10 | NC | NC |
5 | Masse | Ausgangsmasse | 11 | AUSA | Ausgang A |
6 | NC | NC | 12 | SENA | Laststrommessklemme A |


PWM breites Rechtecksignal (TTL-Pegel) | DIR Richtungssteuersignal (TTL-Pegel) | AusA | OutB | Betriebszustand des Gleichstrommotors |
1 | 0 | 1 | 0 | Nach vorne |
1 | 1 | 0 | 1 | Umkehrung |
0 | 0 | 0 | 0 | Stoppen |
0 | 1 | 0 | 0 | Stoppen |
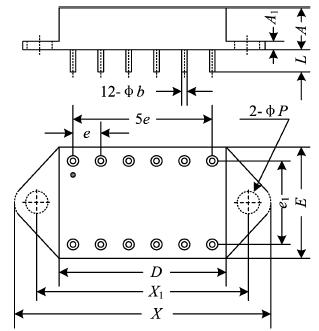
Symbol | Daten /mm | ||
Mindest | Typisch | Mindest | |
A | - | - | 7.9 |
A1 | 1.9 | - | 2.7 |
Φb | 0,87 | - | 1.13 |
D | - | - | 38.80 |
E | - | - | 41,90 |
e | - | 5.08 | - |
e1 | - | 30.48 | - |
L | 11.0 | - | - |
X1 | 49.26 | - | 50.26 |
X | - | - | 59.15 |
ΦP | 3,70 | - | 4.30 |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier